Jacob Rosen is a professor of medical robotics at the Department of Mechanical and
Aerospace Engineering with joint appointments with the Department Surgery and the
Department of Bioengineering at UCLA.
His research interests focus on medical robotics, ranging from bio-robotics, human-centered
robotics to neural control and human-machine interfaces. Dr Rosen has developed several
key systems in the field of medical robotics such as the Blue and the Red Dragon for
minimally invasive surgical skill evaluation and telesurgery. He’s also worked on several
generations of upper and lower limb exoskeletons and most recently the Exo-UL7 – a dual
arm wearable robotic system. We visited Jacob during our stay in LA in February 2018 and
had the opportunity to see the prototypes up close. Join us as we explore the creation of his
futuristic technology!
Surgical robotics
Surgical robotics involve the application of advanced robotic technology to minimally
invasive surgery (MIS) and open surgery training and procedures. One of the most
challenging tasks in the field of biorobotics is to create an effective human machine
interface.
Due to the time delays experienced even in the most advanced mechanisms, the most
plausible solution to create a surgical robot involves system automation, which would
remove the human agency and the risk of human error. However, the everyday use of these
robots is still often challenged by the research community as a result of the lack of
understanding of decision making processes and the ethical implications of artificial
intelligence.
Prof Rosen in conjunction with the Bionics Lab at UCLA has created a series of surgical
robots that have since revolutionized the field of biorobotics. He’s built up on the idea that his
robots will be the tool that people will learn to use through human machine interactions.

Raven IV - A Surgical Robotic System
Raven IV is a surgical robotics system that was developed at the University of California –
Santa Cruz which includes four robotics arms and 2 cameras. The system facilitates a
collaborative effort of two surgeons interacting with the surgical site remotely. The system
architecture allows two surgeons in two remote locations to connect via internet connection
using a UDP protocol and a unique software client interface to teleoperate the surgical
robots.
Raven I - A Surgical Robotic System
Raven is a surgical robotic system that includes two portable surgical robotic arms and a
portable surgical console. The system is capable of communicating via Internet and
travelling to a desired location. The surgical robot can be deployed in a hospital operating
room setup as well as in an operating room in a remote or harsh environment.
The surgical robot Raven II was developed as a collaborative effort by UCSC and UW and it
was featured in the movie 'Ender's Game'.
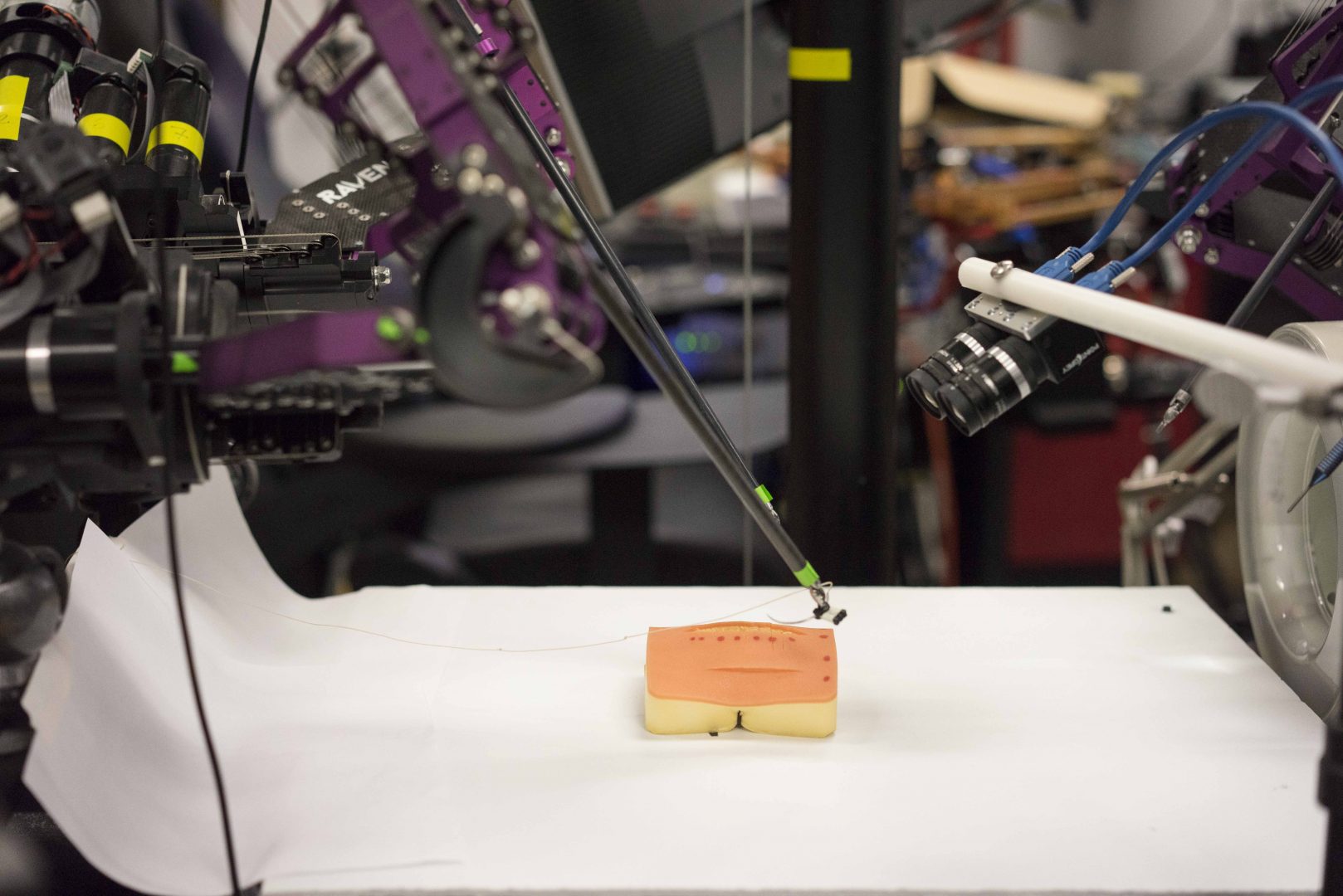
Red DRAGON (Edge)
The Red DRAGON is a system created to measure the kinematics and the dynamics of two
endoscopic tools along with the visual view of the surgical scene during a surgical
procedure. The system can be used in three different modalities: animal model, physical
model simulator, virtual reality simulator.
Exoskeletons
Integrating human and robot into a single system offers remarkable opportunities for creating
a new generation of assistive technology for both healthy and disabled people. Humans
possess naturally developed algorithms for control of movement, but they are limited by their
muscle strength. In addition, muscle weakness is the primary cause of disability for most
people with neuromuscular diseases and injuries to the central nervous system. In contrast,
robotic manipulators can perform tasks requiring large forces; however, their artificial control
algorithms do not provide the flexibility to perform in a wide range of fuzzy conditions while
preserving the same quality of performance as humans. It seems therefore that combining
these two entities, the human and the robot, into one integrated system under the control of
the human, may lead to a solution that will benefit from the advantages offered by each
subsystem. Rosen is currently developing a fully functional exoskeleton that grants 95% of
body movement to the wearer while assisting patients with movement.
3.1 upper-limb exoskeleton
Exoskeleton Prototype 3 (EXO-UL3)
The exoskeleton robot, serving as an assistive device, is worn by the human and functions
as a human-amplifier. Its joints and links correspond to those of the human body, and its
actuators share a portion of the external load with the operator.
The goal of this research is to design, build, and study the integration of a powered
exoskeleton controlled by myosignals for the human arm. The research will pursue this goal
through several objectives: (i) developing an 8 degrees of freedom powered
anthropomorphic exoskeleton for the arm, including grasping/releasing; (ii) setting the HMI at
the neuromuscular level by using processed sEMG signals as the primary command signal
to the exoskeleton system; (iii) developing muscle models (myoprocessor) for predicting the
human arm joints' torques; (iv) developing control algorithms that will fuse information from
multiple sensors and will guarantee stable exoskeleton operation; (v) evaluating the overall
performance of the integrated system using standardized arm/hand function tests.
Rosen and his team have anticipated that their research will advance the current knowledge
in the field of modeling human muscles. This knowledge will be further used to create a
novel HMI and will permit a better understanding of the interaction between human and robot
at the neural level.

lower-limb exoskeleton prototype
Prof Rosen and his team are currently also researching lower-limb exoskeletons. The first
lower-limb exoskeleton prototype is a 12 degrees of freedom system aimed to assist in
carrying a payload. The system is carefully designed to enhance energy management and
endurance. The prototype has attracted a great deal of interest from the military sectors, as it
would facilitate the transport of heavy loads. For Rosen, this exoskeleton won’t only be a
great help in commercial and defense settings but it would also be an ideal hiking buddy!